-
酒瓶机器人自动装箱工作站
酒瓶机器人自动装箱工作站。背景技术:随着科技的发展,机器人自动化包装技术已经逐渐扩展到各种工业领域,在传统的工业中,酒瓶分箱打包操作还依赖人工进行打包,效率低下,不利于工业化生产。技术实现要素:本实用新型的目的是为了解决现有技术中存在效率低下的缺点,而提出的一种酒瓶机器人自动装箱工作站。为了实现上述目的,本实用新型采用了如下技术方案:设计一种酒瓶机器人自动装箱工作站,包括上料输送线,上料输送线与清
2019-12-17 aipaae
-

六轴工业机器人喷漆、上料工作站
六轴工业机器人喷漆、上料工作站。背景技术:如图1所示,现有的一种零部件,包括一个圆盘部和一个把手部,形状不算规则,在涂装时,要求两部分的颜色不一样。在喷漆时,由工人手持喷枪进行喷漆操作,产品容易受到员工的工作状态和品质意识的影响,造成品质的不稳定。喷涂的涂料的不均匀,不美观。另外,产品处于不同的工位,需要产品在不同的工位来回移动,浪费时间,导致生产效率低。技术实现要素:本实用新型的目的是提供一种六
2019-12-17 aipaae
-
锅炉管板焊接机器人工作站
锅炉管板焊接机器人工作站。背景技术:目前锅炉管板的生产制作过程中,因工件直径较大,长度较长,且焊接位置在工件的端部。采用人工焊接速度较慢,劳动强度大,由于工件需翻转,故存在一定的安全隐患,而且焊接质量等得不到很好的保证,生产效率也不高。技术实现要素:针对上述问题,本实用新型提供一种专用设备用于锅炉管板零件的翻转变位焊接,以提高焊接生产效率,提高生产的安全性,并降低工人劳动强度。本实用新型的技术方案
2019-12-17 aipaae
-
机器人焊接工作站的翻转变位机
机器人焊接工作站的翻转变位机构。背景技术:目前,一些机械制造企业对于支架焊接加工比较重视,比如支架焊接总成零件,在满焊过程中,为避免手工作业时焊缝外观质量差,焊接作业效率低等缺陷,大都采用机器人焊接工作站进行焊接作业。现有技术中的机器人焊接作业时,使用的翻转变位机构都是单工位或手动操作,存在定位精度低,劳动效率低的缺点。因此,研制一种结构紧凑、操作灵便,能与机器人焊接工作站配套使用的翻转变位机构,
2019-12-17 aipaae
-
![龙门移动式机器人焊接工作站系统]()
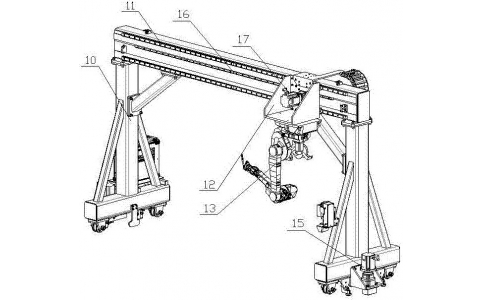
龙门移动式机器人焊接工作站系统
龙门移动式机器人焊接工作站系统。背景技术:目前,公知的机器人焊接工作站多采用落地式机器人焊接,由于机器人本身的结构限制,使得机器人在焊接某些特殊工件时所需的臂展达不到适用要求,并存在较明显的缺陷,1、现有的机器人焊接没有有效的集烟除尘设施,污染比较严重;2、现有的机器人焊接弧光裸露,有害工人的身体健康;3、现有的机器人焊接无法进行大跨度的移动操作,机器人工作区域有限;4、现有的机器人焊接工位比较紧
2019-12-17 aipaae
-
![机器人激光焊接工作站]()
机器人激光焊接工作站
机器人激光焊接工作站。焊接是金属制品加工过程中的主要连接方式,随着焊接的技术的发展,科技水平的进步,金属焊接方式逐渐由人工焊接转向激光焊接,但是传统的激光焊接过程中,激光焊接设备只能针对特定平面的金属进行焊接,不能够对不规则形状的金属表面进行多方位焊接。为此,我们提出了一种机器人激光焊接工作站。 技术实现要素:本发明的目的是为了解决现有技术中存在的缺点,而提出的一种机器人激光焊接工作站。
2019-12-17 aipaae
-
![机器人倒装式双工位工作站的制作方法]()
机器人倒装式双工位工作站的制作方法
本实用新型涉及机器人工作站领域,尤其涉及一种机器人倒装式双工位工作站。在生产线加工工作中,工作台配合机器人的使用越来越普遍,机械工作台给工件的加工、维修、装配工作提供便利,目前常用的机械工作台普遍为平台结构,结构和功能都传统单一,起到的作用有限,而在装配工作中或多工序操作中,工作人员需要进行传递工作,尤其是双工位操作工作中,两个工作人员需要彼此交替完成部件的装配或维护工作,但目前使用的平台结构的工
2019-12-17 aipaae
-
![机器人工作站夹具快换定位机构的制作方法]()
机器人工作站夹具快换定位机构的制作方法
机器人工作站夹具快换定位机构。 背景技术:现在汽车厂的工作站焊接都是多车型混合焊接生产,则要求夹具能够快速准确切换,现有的夹具在落位的时候需单独重新打孔安装在地面上,工作量巨大,非常不效率,化学螺栓在安装时候如果没有按照要求按装,将导致后面机器人焊接夹具的时候焊点或者焊缝偏移。 技术实现要素:针对现有技术的不足,本实用新型提供了一种机器人工作站夹具快换定位机构,使得机器人工作站中夹具的精确定位
2019-12-17 aipaae